Design and construct an autonomous robot to take part in a basketball shoot-out, against a similar robot.
Each robot picks up a
ball behind its baseline, and carries and drops or shoots it into a common “basket”,
and returns to the baseline to retrieve another ball and continue. Game ends
when the basket is full, or both sides run out of balls, and the side with more
balls in the basket wins.
Game field:
The game field,
basically, consists of three parallel lines, with 1 meter spacing between them;
i.e., two base-lines and “center-line (gap)”
separating the two half-fields. Teams are expected to provide a platform to
form their own half-field, with width, length and thickness (height) commonly
agreed upon (*), without any markings, 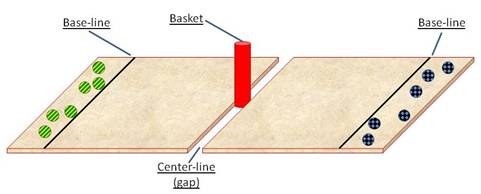 except the base-lines.
except the base-lines.
Balls to be used are standard ping-pong balls or anything compatible
in size. Initially 6 balls for each player are arbitrarily “placed” behind each
player’s baseline (i.e., the outer lines) at the floor level. During the game,
balls that are dropped and remain on the platform may
be re-used.
The “basket” is a 50
mm PVC pipe of length 20 cm, or equivalent, vertically placed between the two
half fields, to be padded inside so that it can accommodate exactly 5 balls but
no more.
Upon start command, teams will start their robots through means designed for the purpose.
Other restrictions:
![]() The robots are to deal with a single ball at
a time.
The robots are to deal with a single ball at
a time.
![]() The robot, at all times, must fit inside an
“upright” cylinder of 30 cm. in diameter.
The robot, at all times, must fit inside an
“upright” cylinder of 30 cm. in diameter.
![]() External instrumentation can
be placed only on or above the area behind the baseline. No hard wiring is allowed between external instrumentation and the robot.
External instrumentation can
be placed only on or above the area behind the baseline. No hard wiring is allowed between external instrumentation and the robot.
![]() Teams are urged to
mark their balls in particular colors and patterns of their team.
Teams are urged to
mark their balls in particular colors and patterns of their team.
![]() Crossing to the opponent’s half field or
touching the “basket” is not allowed, and violations should be penalized.
Crossing to the opponent’s half field or
touching the “basket” is not allowed, and violations should be penalized.
(*) Common standards to be
satisfied to make fair game possible, such as the width, total length and
height (thickness) of the platform, unspecified properties of the “basket”
etc., are to be decided upon by a joint standards committee, composed of
representatives of teams undertaking the project.